
Introduction #
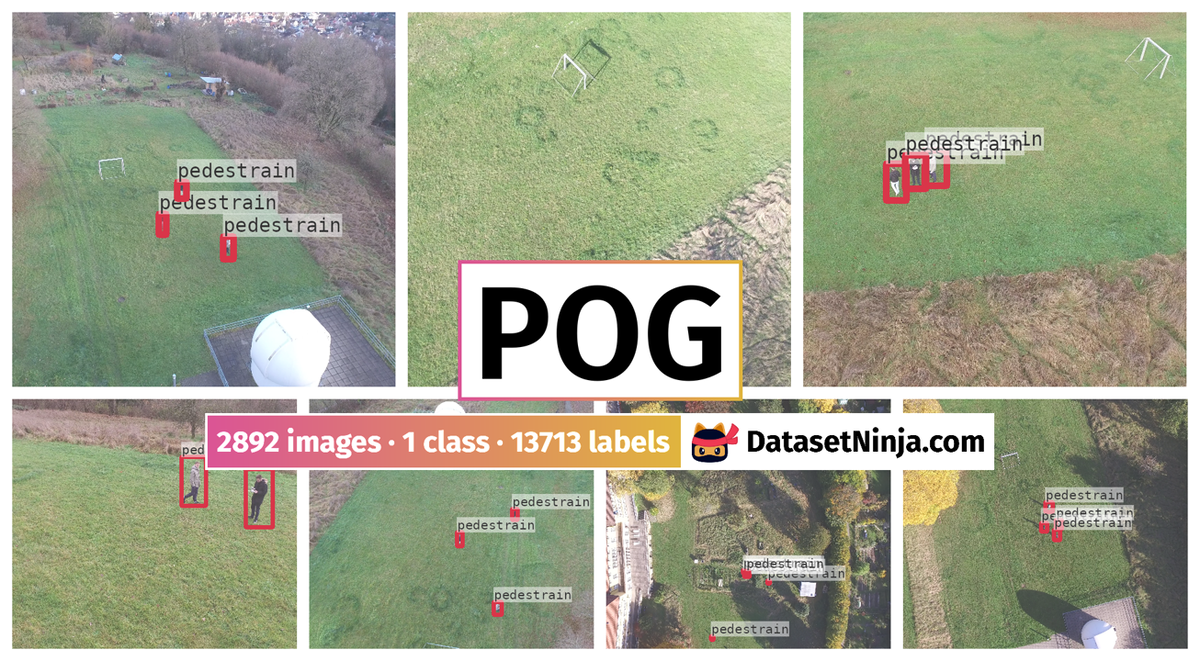
The POG: People On Grass Dataset is a real-world dataset. It shows people on mostly grassy areas from various angles and altitudes between 4 and 103 m. It contains 13,713 objects in 2900 images. The images are taken with a resolution of 3840 × 2150 px and also come with meta data like GPS location, altitude and attitude. The pictures were taken with a UAV by the University of Tübingen as part of the Avalon project.
Motivation
Detection of objects from Unmanned Aerial Vehicles (UAVs) has emerged as a significant area of research due to its wide-ranging applications, including traffic surveillance, smart city management, and search and rescue operations. Despite notable advancements in generic object detection, the task remains highly challenging when applied to images captured by UAVs, primarily due to the diverse conditions encountered across domains.
One of the foremost challenges lies in the variability of images captured from different altitudes. Objects appear in vastly different scales, ranging from as small as 10 pixels to over 300 pixels, depending on the altitude. Lower altitudes yield detailed images, whereas higher altitudes result in blurrier images with more objects captured. Moreover, UAVs often utilize gimbal cameras, allowing for capturing objects from various viewing angles (pitch axis), further adding to the complexity. The roll axis of a UAV introduces additional variation, leading to objects being captured with diverse aspect ratios and orientations. This variability is particularly pronounced in top-down views, making it challenging to distinguish between similar objects such as cars and vans.
Numerous factors contribute to the appearance of objects, including variations in weather conditions, time of day, GPS location, and camera sensor characteristics. For instance, weather conditions like rain or sunshine affect object illumination, while different times of day can alter visibility. Backgrounds also vary significantly between urban and rural areas, further complicating object detection. Additionally, differences in camera lenses introduce distortions that impact image quality. These variations become even more critical when considering the interaction between different domains, highlighting the complexity of object detection from UAV-captured images.
Dataset description
The authors have compiled the experimental dataset PeopleOnGrass (POG), which comprises 2,900 images with a resolution of 3840x2160 pixels. These images depict individuals captured from various perspectives and altitudes, ranging from 0° (horizontal) to 90° (top-down), and heights spanning from 4 meters to 103 meters. Each image is meticulously labeled with its precise altitude and angle of capture. Additionally, the dataset includes supplementary metadata such as GPS coordinates, UAV velocity and rotation information, timestamps, and other relevant details.
Example images of the dataset POG, showing the same scenery taken from different perspectives (top: 10m, 10◦, bottom: 100m, 90◦).
The data collection was conducted using a DJI Matrice 210 drone equipped with a Zenmuse XT2 camera. Metadata was extracted using DJI’s onboard software development kit. A metadata stamp is generated for each frame at a rate of 10 hertz to synchronize with the video data captured at 30 frames per second. To ensure temporal alignment between the videos data and timestamps, a nearest neighbor method was applied. For each image/frame, the dataset provides logged data from onboard sensors including the clock, barometer, Inertial Measurement Unit (IMU), and Global Positioning System (GPS) respectively:
- current datetime of capture,
- latitude, longitude and altitude of the UAV,
- camera pitch, roll and yaw angle (viewing angle),
- speed along the x-, y and z-axes.
The meta values lie within the error thresholds introduced by the different sensors.
Distribution of objects in PeopleOnGrass (POG) across different levels of altitude and camera pitch angles. For visualization purposes only a 4x10 grid is shown.
The authors manually and carefully annotate 13,713 people. They note that this is a simple real-world data set, suffering from fewer confounders than large data sets which is ideal for testing out the efficacy of multi-modal methods.
 Homepage
Homepage Research Paper
Research PaperSummary #
POG: People on Grass Dataset is a dataset for object detection and identification tasks. It is used in the drone inspection domain.
The dataset consists of 2892 images with 13713 labeled objects belonging to 1 single class (pedestrain).
Images in the POG dataset have bounding box annotations. All images are labeled (i.e. with annotations). There are 2 splits in the dataset: train (2496 images) and val (396 images). Alternatively, the dataset could be split into 11 meta data: altitude_above_seaLevel(feet) (2892 images), compass_heading(degrees) (2892 images), datetime(utc) (2892 images), distance(feet) (2892 images), height_above_takeoff(feet) (2892 images), latitude (2892 images), longitude (2892 images), pitch(degrees) (2892 images), roll(degrees) (2892 images), speed(mph) (2892 images), and time(millisecond) (2892 images). The dataset was released in 2023 by the University of Tübingen.
Explore #
POG dataset has 2892 images. Click on one of the examples below or open "Explore" tool anytime you need to view dataset images with annotations. This tool has extended visualization capabilities like zoom, translation, objects table, custom filters and more. Hover the mouse over the images to hide or show annotations.
























Class balance #
There are 1 annotation classes in the dataset. Find the general statistics and balances for every class in the table below. Click any row to preview images that have labels of the selected class. Sort by column to find the most rare or prevalent classes.

Class ㅤ | Images ㅤ | Objects ㅤ | Count on image average | Area on image average |
|---|---|---|---|---|
pedestrain➔ rectangle | 2892 | 13713 | 4.74 | 0.34% |
Images #
Explore every single image in the dataset with respect to the number of annotations of each class it has. Click a row to preview selected image. Sort by any column to find anomalies and edge cases. Use horizontal scroll if the table has many columns for a large number of classes in the dataset.
Object distribution #
Interactive heatmap chart for every class with object distribution shows how many images are in the dataset with a certain number of objects of a specific class. Users can click cell and see the list of all corresponding images.
Class sizes #
The table below gives various size properties of objects for every class. Click a row to see the image with annotations of the selected class. Sort columns to find classes with the smallest or largest objects or understand the size differences between classes.
Class | Object count | Avg area | Max area | Min area | Min height | Min height | Max height | Max height | Avg height | Avg height | Min width | Min width | Max width | Max width |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
pedestrain rectangle | 13713 | 0.08% | 7.7% | 0% | 17px | 0.79% | 945px | 43.75% | 73px | 3.38% | 13px | 0.34% | 715px | 18.62% |
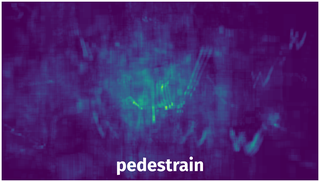
Spatial Heatmap #
The heatmaps below give the spatial distributions of all objects for every class. These visualizations provide insights into the most probable and rare object locations on the image. It helps analyze objects' placements in a dataset.
Objects #
Table contains all 13713 objects. Click a row to preview an image with annotations, and use search or pagination to navigate. Sort columns to find outliers in the dataset.
Object ID ㅤ | Class ㅤ | Image name click row to open | Image size height x width | Height ㅤ | Height ㅤ | Width ㅤ | Width ㅤ | Area ㅤ |
|---|---|---|---|---|---|---|---|---|
1➔ | pedestrain rectangle | 1232.png | 2160 x 3840 | 67px | 3.1% | 51px | 1.33% | 0.04% |
2➔ | pedestrain rectangle | 1232.png | 2160 x 3840 | 80px | 3.7% | 55px | 1.43% | 0.05% |
3➔ | pedestrain rectangle | 1232.png | 2160 x 3840 | 61px | 2.82% | 48px | 1.25% | 0.04% |
4➔ | pedestrain rectangle | 1232.png | 2160 x 3840 | 77px | 3.56% | 51px | 1.33% | 0.05% |
5➔ | pedestrain rectangle | 1232.png | 2160 x 3840 | 62px | 2.87% | 52px | 1.35% | 0.04% |
6➔ | pedestrain rectangle | 1232.png | 2160 x 3840 | 71px | 3.29% | 52px | 1.35% | 0.04% |
7➔ | pedestrain rectangle | 1915.png | 2160 x 3840 | 40px | 1.85% | 45px | 1.17% | 0.02% |
8➔ | pedestrain rectangle | 1915.png | 2160 x 3840 | 33px | 1.53% | 43px | 1.12% | 0.02% |
9➔ | pedestrain rectangle | 300.png | 2160 x 3840 | 131px | 6.06% | 57px | 1.48% | 0.09% |
10➔ | pedestrain rectangle | 300.png | 2160 x 3840 | 126px | 5.83% | 41px | 1.07% | 0.06% |
License #
License is unknown for the POG: People on Grass Dataset dataset.
Citation #
If you make use of the POG data, please cite the following reference:
@dataset{POG,
author={Benjamin Kiefer and Martin Messmer and Leon Varga},
title={POG: People On Grass Dataset},
year={2023},
url={https://uni-tuebingen.de/fakultaeten/mathematisch-naturwissenschaftliche-fakultaet/fachbereiche/informatik/lehrstuehle/kognitive-systeme/projects/avalon/}
}
If you are happy with Dataset Ninja and use provided visualizations and tools in your work, please cite us:
@misc{ visualization-tools-for-pog-dataset,
title = { Visualization Tools for POG Dataset },
type = { Computer Vision Tools },
author = { Dataset Ninja },
howpublished = { \url{ https://datasetninja.com/pog } },
url = { https://datasetninja.com/pog },
journal = { Dataset Ninja },
publisher = { Dataset Ninja },
year = { 2026 },
month = { jul },
note = { visited on 2026-07-14 },
}Download #
Please visit dataset homepage to download the data.
Disclaimer #
Our gal from the legal dep told us we need to post this:
Dataset Ninja provides visualizations and statistics for some datasets that can be found online and can be downloaded by general audience. Dataset Ninja is not a dataset hosting platform and can only be used for informational purposes. The platform does not claim any rights for the original content, including images, videos, annotations and descriptions. Joint publishing is prohibited.
You take full responsibility when you use datasets presented at Dataset Ninja, as well as other information, including visualizations and statistics we provide. You are in charge of compliance with any dataset license and all other permissions. You are required to navigate datasets homepage and make sure that you can use it. In case of any questions, get in touch with us at hello@datasetninja.com.